
There is an old saying in the aeronautical world which goes a bit like this “if it looks right, it will fly right”. Now this dates back to the time when aircraft were designed with slide rules, drawing boards and a bit more “intuition” for want of a better word than you would use today.
Back then there was no supercomputer modelling of fluid dynamics, aerodynamics were limited to using the wind tunnels of the time, and computer-controlled surfaces to control aerodynamically unstable designs weren’t even a dream.
In the early part of the 20th century, aerodynamic smoothing was all the rage and seen in many places, on trains, cars, and of course aircraft, so there was a certain amount of truth in the saying.
Although as we will see, if something looked a bit odd or strange and didn’t conform to the “right look”, it didn’t necessarily mean that it wouldn’t fly right, it just might fly differently from how you might expect.
So in this video I’m going to look at some of the stranger-looking aircraft that you might think would have difficulty just getting off of the ground and see why they were built in the first place and if they really break the “if it looks right it, it will fly right – right ” rule.
Now, if anything exemplifies the experimental aircraft it’s the X-Planes, prototype aircraft built in the US since the 1940s that test the boundaries flight and have led to some of the biggest breakthroughs in aviation.
The “X” in the name represents experimental, and they were usually operated by NASA, its predecessor the NACA and DARPA, and boy there have been some really rather experimental looking aircraft over the years but let’s start with an interesting one.
The Douglas X-3 Stiletto was a 1950s experimental jet aircraft with an incredibly long nose with a very gentle taper to an equally slim fuselage, semi-buried cockpit and windscreen and tiny trapezoidal wings.
The reason for this design choice was to try and create as little drag as possible at supersonic speeds, induce stability and test the feasibility of low aspect ratio wings, shifting the loading from the wings to the fuselage.
To combat the heat generated from the expected extreme speeds it would be one the first aircraft to be made mostly of titanium. However, things didn’t go well from the offset.
Its primary goal was to investigate the design features required for sustained supersonic speeds of up to Mach 2.6, 2000 mph or 3200 km/h. The irony was that it was so seriously underpowered in level flight it only managed to get to Mach 0.91, 706 MPH or 1136 km/h at 20,000 feet. The only way it could get anywhere near the supersonic speeds it was designed to test was during upto 30-degree dives.
The reason for this was that the planned Westinghouse J46 engine’s we’re unable to meet the size, weight and thrust requirements, so they fitted the Westinghouse J34s which produced only 4900lbf of thrust compared to 7000lbs thrust of the intended J46s.
On its 1st flight, they soon discovered that this lack of powered made it difficult to control, made worse by the high take-off speed of 260 MPH or 420 kilometres per hour.
Although the X-3 was designed to study supersonic stability, in tests when rolling the aircraft between Mach 0.9 and Mach 1.154 it would experience “roll inertia coupling”, this is where a manoeuvre in one axis like rolling left or right, would cause an uncommanded manoeuvre in one or two of the other axis’s like pitch and or yaw and very nearly led to the loss of the aircraft, this was early proof of the phenomena that occurred particularly amongst long thin aircraft.
The X-3 was good for tests though with most of its mass concentrated in the long, narrow fuselage rather than its wings, which was typical of fighter designs of the time.
Of the two X-3s ordered just one was built, they toyed with the idea of replacing the J34s with rocket engines but after 51 nerve-raking test flights, it was decided that with the roll inertia coupling and even higher speeds it would be just too dangerous to fly.
The X-3 was retired in 1956 and is now in the National Museum of the United States Air Force at the Wright-Patterson Air Force Base, Dayton, Ohio.
Although the X3 never lived up to its expectations, it did provide valuable information on the dangers of roll inertia coupling. The small wings and titanium structure were used later on the Lockheed F-104 starfighter and the high take-off and landing speeds pushed the development of tyre technology for aircraft.
As for the very long nose, this has made a comeback in another much more recent X-plane, the Lockheed X-59 which is still in development, the very long nose design here is an attempt to fly supersonically with a very low sonic boom.
Now from something which looked like it a needle, to something which looked like it would should not fly at all and was nicknamed the flying bathtub for a reason.
This was the NASA M2-F1 for research into lifting bodies, aircraft which gain their aerodynamic lift not from wings but the shape of the body itself.
Essentially a lifting body aircraft can be thought of as a fuselage but without wings and in particular these were designed for subsonic,supersonic or hypersonic flight and particularly for spacecraft re-entry.
The M2-F1 was a little bit more basic being built out of mahogany plywood over a tubular steel frame and with no engine it was effectively a glider.
Its first flights in 1963 were being towed behind a car along a runway, then towed by a DC3 up to 12,000 feet where it would be released and glide to the runway landing at 80 MPH or 130 km/h. In all over 400 ground tow flights and 77 aircraft tow flights were made in the M2-F1.
Its successor the M2-F2 would be a true heavyweight flying laboratory weighing in at 3 tonnes and built by Northrop corporation in 1966. These would be glide flights before powered test flights would be performed.
This time the M2-F2 would be carried to 45,000 feet, 14,000 metres under the wing of a B52. Everything went well up until the last flight which suffered from pilot induced oscillation nearby lake bed landing area as it was coming into land. The pilot Bill Peterson, corrected the oscillation but then was distracted by a rescue helicopter which he thought might be a collision threat and drifted into a crosswind on an unmarked area of the lake bed.
Because there were no markers on the ground the pilot found it difficult to judge for height and hit the lake bed before the landing gear was fully deployed and locked. In the spectacular looking crash the vehicle rolled over six times but the pilot survived, and the airframe was rebuilt. The crash footage was later used in the opening credits of the $6 million man TV series.
The third in this series of NASA lifting body vehicles was the HL-10, again built by Northrop corporation. This added third tail stabiliser and a reaction motors XLR-11 rocket motor with 8000 lbs of thrust.
During a typical flight the HL 10 would be dropped from a B52 at about 45,000 feet, a few moments later the rocket engine would be ignited and it would fly up to 100 seconds of powered flight reaching between 50 and 80,000 feet 15 to 24,000 metres at speeds up to Mach 1.86 making it the fastest lifting body aircraft in the programme.
It would then follow a simulated return from space corridor to land at the Rogers dry lake at Edwards Air Force Base landing at about 200 MPH or 320 km/h.
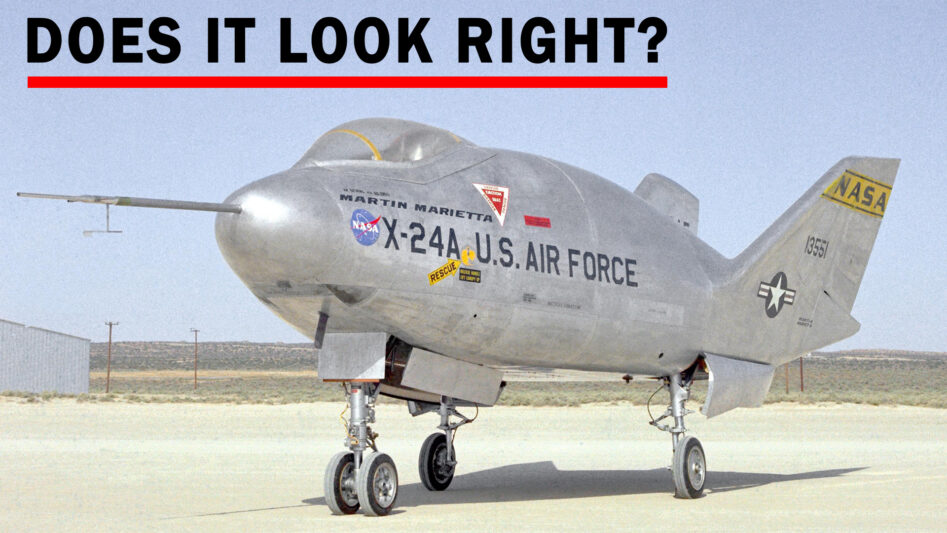
The UASF were also interested in lifting bodies and in April 1969 the X-24A built by Martin Marietta Was flown in.
This looked even more like a plane that had been built without any wings but was completely redesigned in 1972 into the X-24B which its shape which would greatly influence the space shuttle design after the initial HL-10 shape was considered and then rejected because the curvature of the lifting body would make it too difficult to attach an external fuel tank and boosters, so a delta wing design of the X-24B was used instead.
The X-24B delta wing design was also an exercise in cost reduction as the rounded top flat bottom double delta planform was cheaper to make than the continuous curved design of the HL-10.
The X-24B performed similar figures to the HL-10 reaching a maximum speed of Mach 1.516 at 73,130 feet or 22,590 metres and flew 36 missions, 12 unpowered and 24 powered.
Now we go from a supersonic plane with no wings something that doesn’t even look like a plane at all, with no wings, tail or fuselage that can fly up, down, left and right and required no runway.
Yes, we’re talking about the Rolls Royce thrust measuring rig, AKA the “flying bedstead” and was the first jet lift aircraft to fly anywhere in the world and would become the basis of probably the most famous VTOL or vertical takeoff and landing aircraft the Harrier jump jet.
The Trust Monitoring Rig or TRM was built to explore the capabilities of the new jet engines that were being developed after World War 2.
It used two Rolls Royce Nene turbojet engine’s mounted back-to-back in a steel framework which was supported on four legs with casters for wheels. To the left and right and forward and aft there were compressed air jets which were used to stabilise the craft when hovering and moving.
Its first flight was in August 1953, there were no lifting surfaces and all the thrust was being directed downwards. Originally it was used within a gantry like arrangement which It was tethered to, to prevented it from exceeding a defined space and also from descending too quickly. In 1954 it was moved to an open air research facility to research artificial stabilisation both during hover and low speed stages of flight.
Although it could hover and move around with the thrusters it didn’t have directional thrust as such which meant wind speeds of more than 6 mph or 10 kilometres or greater it would be difficult to control.
The biggest problem that new pilots to it found was the lag between the throttle movements by the pilot and the engine response time of around one to two seconds, but they soon learned to accommodate this and became quite adept at height control.
Two TMR’s were built, the first one survived the failure of its vectored thrust system in September 1957 but the second one was destroyed a month later during a test flight leading to the death of its pilot, Wing Commander Larson who had been piloting it for the first time.
The TMR was just a means to an end and the next step would be to build an actual aircraft and this would be the short SC.1 built by Short brothers of Northern Ireland.
This used a much more conventional aircraft frame so they would be able to fly both horizontally but also take off and land vertically.
To do this it used five Rolls Royce RB.108 turbojet engines, four of which were mounted vertically and used for the vertical flight and one for conventional horizontal flight, although by most reports it had a reputation as being a somewhat ungainly aircraft fly.
The SC.1 also introduced the first fly by wire and an automatic stability control system in a VTOL aircraft that could be switched to manual in the event of automatic system failure.
Two prototypes were built and began tethered flight testing in 1958. In 1960 it made its first free untethered flight and it appeared at the Paris air show in 1961 when it performed a demonstration flight.
The second aircraft crashed during a test flight in 1963 which also killed its pilot, the cause was determined to have been a control malfunction.
During the tests it was found that almost any surface could be used to do the vertical takeoff and landings but the debris thrown up from loose ground could be a risk to personnel nearby but not to the aircraft itself.
The vertical engines were mounted in pairs and could be swivelled for and aft for acceleration or deceleration along the longitudinal axis.
In the later Hawker Siddley Harrier, these would be replaced by one large Rolls Royce Pegasus engine that directed its hot engine exhaust and compressed air from a large fan mounted on the front of the engine through a set of four rotatable nozzles. The fan also supplied compressed air to drive puffer jets at the end of the wings and front of the rear of the aircraft to give it control during hover manoeuvres.
The SC.1 prototypes were flight tested between 1957 and 1971 and the research that came from it resulted the development of the Hawker siddley Harrier which became the first operational VTOL aircraft, which after its retirement in 2006 was replaced almost 10 years later by the Lockheed Martin F-35C which remains the only jet powered VTOL multirole aircraft in service today.
This has only been a very small list of aircraft out of so many that I could have chosen but what are your favourite aircraft that might not look right but does fly right, let me know in the comments below and as always thanks for watching and thanks to our patrons for their on going support.